











Strokovnjaki nemškega kluba ADAC so se na tokratnem testu asistenčnih sistemov posvetili delovanju sistemov za nadzor okolice za vozilom, ki so uporabni predvsem ob vzvratnem parkiranju vozila ali pa ob zapuščanju parkirišča z manevrom vzvratne vožnje.
Nepreglednost iz vozila je ena izmed splošno znanih slabih lastnosti modernih avtomobilov, ki predstavlja posledico kombinacije modnega oblikovanja in izpolnjevanja varnostnih standardov (majhna kabinska stekla, debeli strešni stebrički in masivni vzglavniki …), v dobrih starih časih so imeli avtomobili bolj filigransko izražene strešne konstrukcije ter bolj oglate karoserije, s tem pa se je povečala tudi preglednost iz vozil. V današnjih časih lahko vozniki večinoma samo slutijo, kje se zaključi prednji del avtomobila, da o preglednosti v smeri zadka niti ne govorimo, ker je veliko avtomobilov oblikovanih v stilu 'visoko nasajenih' 5-vratnih 'šišmišev' (crossover) s 'fastback' zadki in posledično slabo odmerjenimi (majhnimi) stekli na zadku, ki se radi kitijo s predikatom 'coupé', čeprav si te prestižne oznake sploh ne zaslužijo.
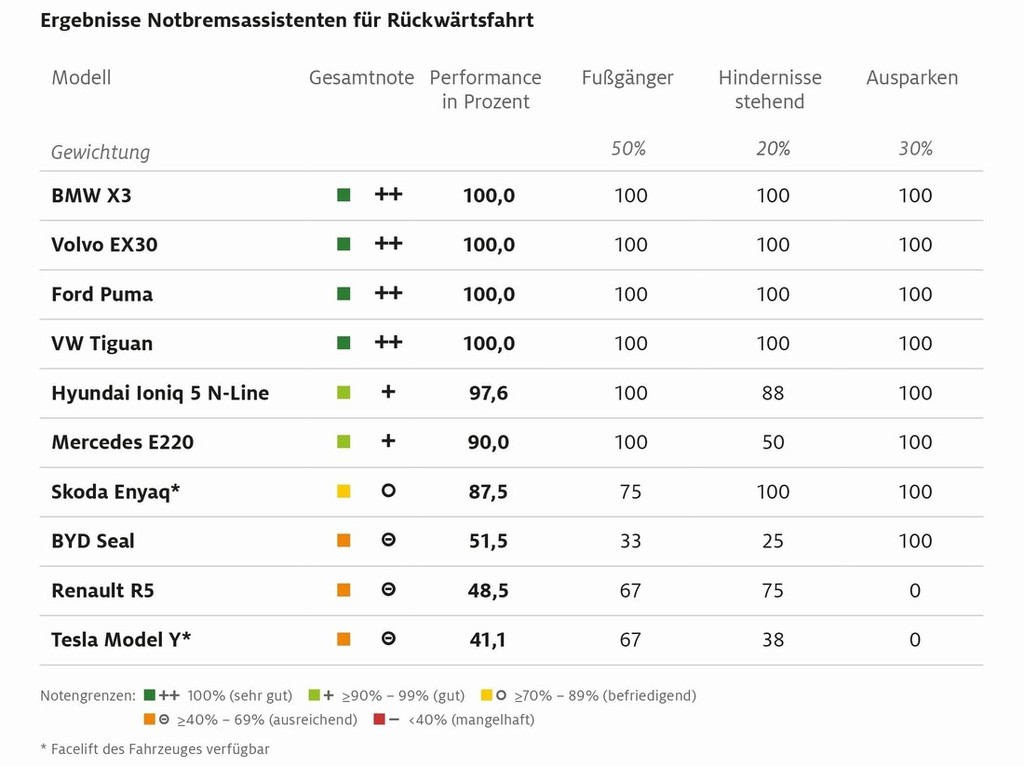
Vse to se odraža tudi v statistiki prometnih nesreč, povezanih z vzvratno vožnjo. Po podatkih kluba ADAC se vsako četrto trčenje s pešci zgodi ravno ob vzvratnem manevriranju z vozilom. Posledično morajo proizvajalci ob opremljanju takšnih 'podmornic' (v pogledu preglednosti iz vozila …) poskrbeti za vgradnjo različne 'invalidske opreme' v obliki sistemov za nadzor okolice za vozilom, ki pa v večini tokrat testiranih vozil niso delovali optimalno, odnosno 100-odstotno. To so razkrili različni testni scenariji, samo štirje izmed desetih testiranih sistemov za nadzor okolice za vozilom, ki so vgrajeni v vozila znamk BMW (X3), Volvo (EX30), Ford (puma) in VW (tiguan) so dobro (100-odstotno) opravili svoje delo.
Trije tokrat odigrani scenariji so vključevali različna možna srečanja s pešci, ki so jih na testih seveda nadomestile lutke. Ukvarjali pa so se tudi z zaznavanjem različnih statičnih preprek in objektov ter z zaznavanjem kolesarjev v gibanju. Ko so Nemci primerjali izsledke tega testa z izsledki podobnega testa iz leta 2019, so ugotovili, da se je delovanje sistemov za nadzor okolice za vozilom izboljšalo, vendar v večini primerov še vedno ne delujejo optimalno. Ob tem so omenili primer hyundaija ioniq 5, ki je ob srečanju s poganjalčkom (Bobbycar) pri hitrosti 8 km/h, ki se je skrival za vozilom, prepozno zaviral in posledično zadel njegovega potnika v obliki otroške lutke.
Še slabše je v tem primeru odreagiral sistem v mercedes-benzu razreda E, ki poganjalčka z otrokom sploh ni zaznal … Omenjajo pa tudi počasen, odnosno prepozen odziv sistema za nadzor okolice za vozilom v izdelku znamke Škoda (model enyag) ter zelo slab odziv izdelka znamke BYD, ki se sploh ni odzval na pešce in ovire neposredno za vozilom. Grajajo pa tudi odziv sistema v modernem renaultu 5, ki sploh ni sposoben zavirati kljub izdanemu opozorilu sistema, da se za vozilom nahajajo ostali udeleženci v prometu, ki se vozilu približujejo iz strani. Popolnoma pa je odpovedal sistem v tesli Y, ker večine izvedenih testnih trčenj sploh ni preprečil, če pa mu je le uspelo zaznati oviro ali pešca, je avtomobil kljub temu prepozno zaviral.





